



Trabalho desenvolvido pelo mestrando Denis Mosconi na Escola de Engenharia de São Carlos da USP foi escolhido como a melhor dissertação do ano durante o 18th IEEE Latin American Robotics Symposium (imagem: divulgação)
Trabalho desenvolvido pelo mestrando Denis Mosconi na Escola de Engenharia de São Carlos da USP foi escolhido como a melhor dissertação do ano durante o 18th IEEE Latin American Robotics Symposium
Trabalho desenvolvido pelo mestrando Denis Mosconi na Escola de Engenharia de São Carlos da USP foi escolhido como a melhor dissertação do ano durante o 18th IEEE Latin American Robotics Symposium
Trabalho desenvolvido pelo mestrando Denis Mosconi na Escola de Engenharia de São Carlos da USP foi escolhido como a melhor dissertação do ano durante o 18th IEEE Latin American Robotics Symposium (imagem: divulgação)
Agência FAPESP* – Estudo de mestrado que elaborou um modelo robótico para a reabilitação do caminhar de vítimas de acidente vascular cerebral (AVC) recebeu o prêmio de melhor dissertação no Concurso de Teses e Dissertações em Robótica do congresso internacional 18th IEEE Latin American Robotics Symposium (LARS 2021), realizado em outubro de forma virtual.
Intitulado “Interaction models between humans and lower-limbs exoskeletons applied to robotic neurorehabilitation", o trabalho foi desenvolvido na Escola de Engenharia de São Carlos da Universidade de São Paulo (EESC-USP) pelo pós-graduando Denis Mosconi, com apoio da FAPESP e orientação do professor Adriano Almeida Gonçalves Siqueira.
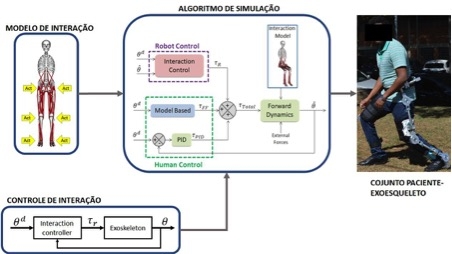
A pesquisa consistiu na elaboração de um modelo computacional de um ser humano utilizando um robô tipo exoesqueleto de membros inferiores e um algoritmo de simulação baseado em dinâmica direta, ambos úteis para o desenvolvimento, simulação, validação e sintonia de controles de interação entre humanos e robôs com foco na reabilitação do caminhar de vítimas de AVC.
Uma das possíveis sequelas resultantes de um AVC é a incapacidade motora de caminhar. Uma vítima que se encontra nessa situação necessita de fisioterapia para recuperar as habilidades perdidas.
Dentre os diversos métodos propostos para auxiliar na reabilitação motora das pessoas acometidas por AVC, destaca-se a neurorreabilitação robótica, onde são utilizados robôs vestíveis, tipo exoesqueletos, para auxiliar o paciente a executar os exercícios do caminhar durante as sessões de fisioterapia.
A fim de tornar o desenvolvimento de tais controles mais ágil e flexível, a dissertação de Mosconi propôs um modelo de interação e um algoritmo de simulação, capazes de permitir que tais controles sejam desenvolvidos, testados, validados e sintonizados computacionalmente antes de serem aplicados aos dispositivos físicos de fato, aumentando a segurança e reduzindo o tempo necessário para seu desenvolvimento.
Como funciona
O modelo de interação consiste em uma matriz computacional de um ser humano vestindo um exoesqueleto, no caso o ExoTAO, que foi desenvolvido pelo Laboratório de Reabilitação Robótica da EESC-USP.
Esse modelo computacional representa o paciente, com sua antropometria (massa, altura, distribuição de massa) e os elementos atuadores do robô, que estão localizados nas articulações do quadril, joelho e tornozelo, contribuindo para que tais juntas possam se movimentar em flexão e extensão.
O algoritmo de simulação permite que os controles de interação desenvolvidos possam ser aplicados ao modelo de maneira a verificar quais seriam os efeitos na prática da combinação do conjunto controle-robô-humano. Com os resultados obtidos por meio das simulações realizadas com o algoritmo, é possível promover adequações e melhorias nos controles, além de validá-los e sintonizá-los para o paciente específico, de maneira que, após tais simulações, o controle estará pronto para ser aplicado no robô com segurança e eficácia.
De acordo com Mosconi, o trabalho contribui para que os métodos pertinentes à neurorreabilitação sejam desenvolvidos de maneira ágil, eficiente e segura.
O modelo de interação e o algoritmo de simulação propostos na dissertação, segundo o autor, possuem uma grande flexibilidade, podendo ser adaptados para outros tipos de exoesqueletos, com diversos controles de interação, e podem inclusive ser utilizados para estudo, modelagem e simulação do controle motor humano. “Ademais, o modelo de interação e o algoritmo podem ser facilmente adaptados para aplicações em membros superiores”, explica Mosconi.
* Com informações da Assessoria de Comunicação da EESC-USP .
A Agência FAPESP licencia notícias via Creative Commons (CC-BY-NC-ND) para que possam ser republicadas gratuitamente e de forma simples por outros veículos digitais ou impressos. A Agência FAPESP deve ser creditada como a fonte do conteúdo que está sendo republicado e o nome do repórter (quando houver) deve ser atribuído. O uso do botão HMTL abaixo permite o atendimento a essas normas, detalhadas na Política de Republicação Digital FAPESP.
