




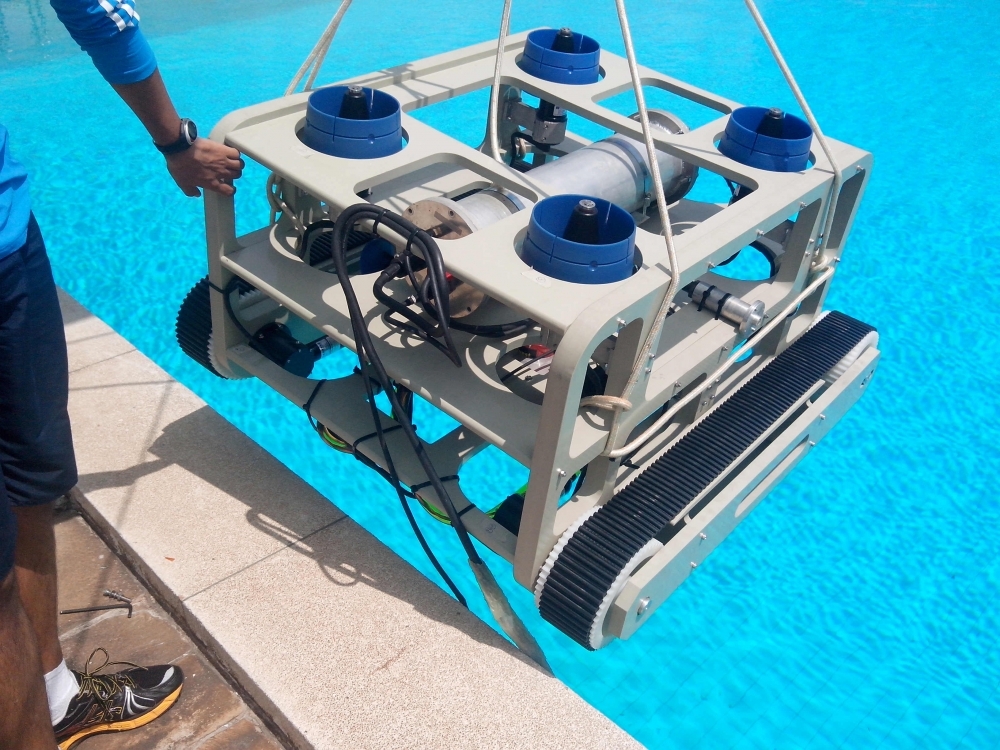
A prototype performed successfully in test tank trials at the University of São Paulo's Naval Engineering Department in Brazil (photo: UFABC)
A remotely operated vehicle uses thrusters to move underwater and crawls over a ship's hull on motorized tracks to detect structural flaws with ultrasonic transducers.
A remotely operated vehicle uses thrusters to move underwater and crawls over a ship's hull on motorized tracks to detect structural flaws with ultrasonic transducers.
A prototype performed successfully in test tank trials at the University of São Paulo's Naval Engineering Department in Brazil (photo: UFABC)
By José Tadeu Arantes
Agência FAPESP – An underwater robotic vehicle for ship hull inspection has been created at the Federal University of the ABC (UFABC) in São Paulo State, Brazil. The principal investigator for the project was Professor Juan Pablo Julca Avila, who headed a team of mechanical engineering undergraduates and graduates working with FAPESP’s support.
A prototype of the vehicle, with thrusters, motorized crawler tracks, floaters and sensors, has been successfully tested in a diving pool and test tank at the University of São Paulo’s Naval Engineering Department (PNV-USP). The prototype responded adequately to remote commands from operators in its “free flight” and “crawl” modes. “We’re now in the second stage of the research project. We want to take the vehicle to Santos to test its locomotion and adhesion control systems in deep water,” Avila told Agência FAPESP.
The key difference compared with similar remotely operated vehicles (ROVs) is that in addition to performing visual inspection of a ship’s hull using a camera, this one can crawl over the hull on tracks, Avila explained. It uses ultrasound transducers to detect cracks and structural flaws and to check that hull thickness is within tolerance limits.
The vehicle’s adhesion to the ship is obtained by purely mechanical means, using four vertical thrusters. When their propellers turn in one direction, they push the vehicle against the hull; when they turn in the opposite direction, the vehicle moves away from the ship. This system avoids magnetic wheels, which would limit operation to steel hulls while also making the device very heavy and difficult to maneuver.
“This underwater robotic vehicle is a hybrid because it has two operational modes: free flight and crawling,” Avila said. “In free flight, it uses a set of thrusters to move underwater to a region of interest. On approaching a vessel, it positions itself so that its base is in contact with the hull. The second mode of operation then comes into play: it uses motorized tracks to crawl over the hull.”
Automatic control of adhesion
This additional functionality makes it an HROV (hybrid remotely operated vehicle) rather than simply an ROV (remotely operated vehicle), like more conventional underwater robots. Its frame is made of polypropylene, and it is powered by electricity supplied via an umbilical cable from an external source. “Thanks to its robust structure and automatic adhesion control based on contact pressure measurement, it’s capable of operating in an offshore environment,” Avila said.
Avila’s group has asked UFABC to apply for a patent. Juan Pablo Julca Avila graduated in mechanical engineering from Trujillo National University in Peru, and he earned a masters degree and PhD from the University of São Paulo’s Engineering School (POLI-USP). He is an associate professor of aerospace engineering at UFABC.
Videos
 |
 |
 |
 |
The Agency FAPESP licenses news via Creative Commons (CC-BY-NC-ND) so that they can be republished free of charge and in a simple way by other digital or printed vehicles. Agência FAPESP must be credited as the source of the content being republished and the name of the reporter (if any) must be attributed. Using the HMTL button below allows compliance with these rules, detailed in Digital Republishing Policy FAPESP.
